
本文将回顾3D 霍尔效应位置传感器的基础原理,介绍这种传感器在机器人、篡改检测、人机接口控制和万向电机系统中的应用。然后以Texas Instruments的高精度、线D 霍尔效应位置传感器为例,介绍相关的评估板及其应用指导,从而加快开发进程。如果您对3D
在各种工业 4.0 应用中,通过 3D 位置检测进行实时控制的情况慢慢的变多,从工业机器人、自动化系统到机器人线D 霍尔效应位置传感器无疑是这些应用的极好选择,因为这种传感器具备极高的重复性和可靠性,而且还可与门窗、外壳组合,用于入侵或磁力破坏探测。3D感测系统的设计挑战与解决方案使用需要与一个功能强大的微控制器 (MCU) 连接,作为角度计算引擎并执行测量平均化,以及增益和失调补偿,以确定磁铁的方向和 3D 位置。MCU 还需要执行各种诊断功能,包括监测磁场、系统温度、通信、连续性、内部信号路径和电源。除了硬件设计外,软件开发也可能是一个复杂而耗时的过程,从而再一次拖延产品上市时间。为客服这些挑战,设计者能够正常的使用具有内部计算引擎的集成霍尔效应 3D 位置传感器 IC。这种 IC 能够简化软件设计,并将系统处理器的负载减少近 25%,从而使用通用型低成本 MCU。这种 IC 还可以为精确的实时控制提供快速采样率、低延迟。在电池供电型设备中,3D 霍尔效应位置传感器能在 5 Hz 或更低的占空比下运行,以最大限度地降低功耗。此外,集成的功能和诊断方法最大限度地提高了设计灵活性、系统安全性和可靠性。什么是 3D 霍尔效应传感器?3D霍尔效应传感器能收集完整的磁场信息,从而在 3D 环境中通过测量距离和角度来确定具置。这种传感器最常见的放置位置有两个:磁极化轴和磁极化共面(图 1)。当放置于极化轴上时,磁场向传感器提供可用于位置测定的单向输入。共面放置则会产生一个与磁铁表面平行但不考虑与传感器距离的磁场矢量,此时也能确定位置和角度。
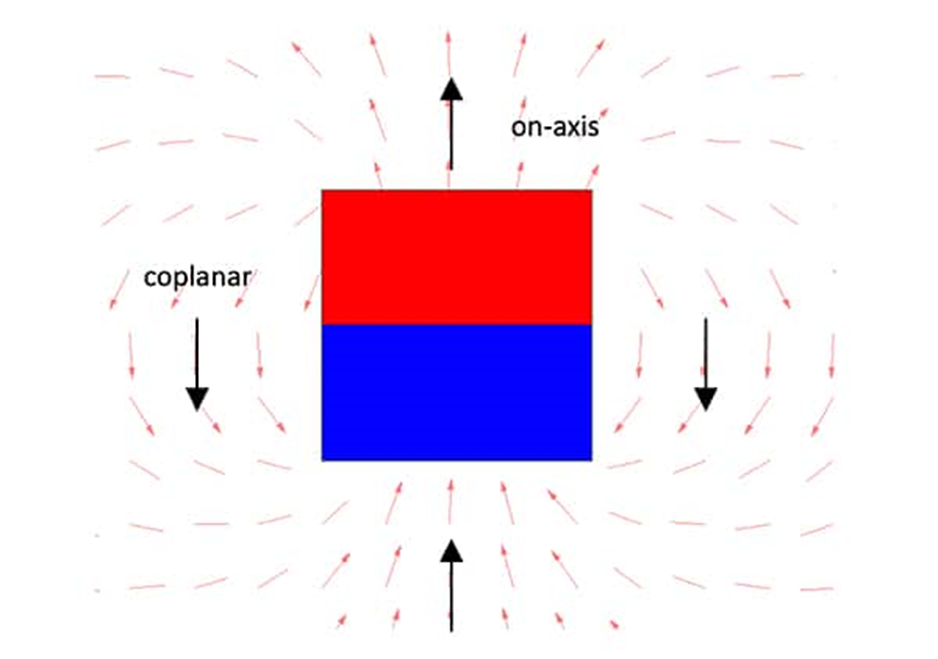
图 1:3D 霍尔效应位置传感器能放在磁场轴上或与磁场共面,以测量距离和角度运动。(图片来自:Texas Instruments)诸如机器人之类的工业 4.0 系统,一定要通过多轴运动检测来测量机器人手臂的角度,或在移动机器人的每个滚轮上进行多轴检测,以支持整个在设施内的导航和精确运动。集成 3D 霍尔效应传感器非常适用于这些任务,因为它们不容易受潮湿或灰尘的影响。使用共面测量法,可对旋转轴磁场进行高度精确的测量(图 2)。

图 2:集成 3D 霍尔效应传感器能测量机器人和其他工业 4.0 应用中的轴旋转。(图片来自:Texas Instruments)诸如电表和煤气表、自动取款机 (ATM)、企业服务器和收银机的安全外壳能够最终靠轴上磁场测量进行入侵检测(图 3)。当外壳被打开时,3D 霍尔效应传感器会检测到的磁通密度 (B) 下降,并且当磁通密度下降至低于霍尔开关的磁通释放点 (BRP) 点时,霍尔效应传感器发出警报。为了在关闭外壳时防止误报警,一定要保持磁通密度必须充足大(相对于 BRP来说)。由于磁铁的磁通密度往往会随着温度的升高而降低,因此使用具有温度补偿功能的 3D 霍尔效应传感器能提高工业或户外环境中设备外壳的系统可靠性。
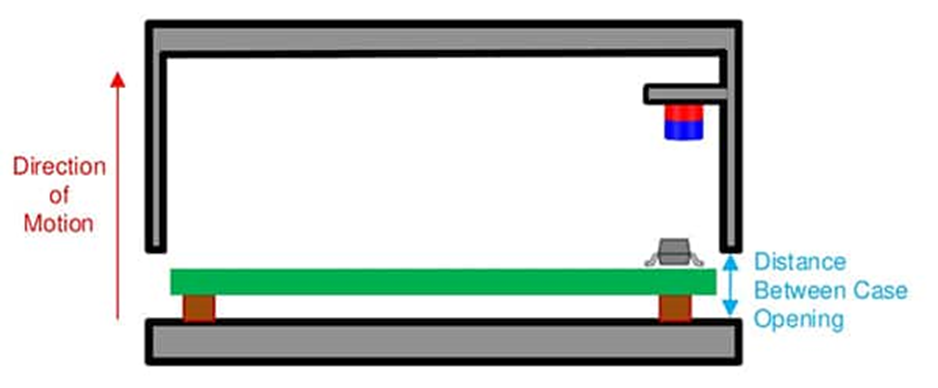
图 3:可以用 3D 霍尔效应传感器来实现外壳篡改检测,以识别非授权访问。(图片来自:Texas Instruments)所有三个运动轴都有益于家用电器、测试和测量设备和个人电子科技类产品中的人机界面和控制。一个传感器能监视 X 和 Y 平面内的运动,以识别转盘的旋转,并能通过监视 X 和 Y 磁轴的大幅移动来识别转盘何时被推动。监视 Z 轴可实现系统能够识别是否错位,并在转盘因为磨损或损坏可能需要预防性维护时发出警报。手持式相机稳定器和无人机中的万向电机系统都得益于使用3D 霍尔效应传感器,这种传感器具有多个磁场灵敏度范围和其他可编程参数,可向 MCU 提供角度测量值(图 4)。MCU会根据需要不断调节电机位置以稳定平台。一个能准确无误地测量在轴和偏轴位置角度的传感器可提高机械设计的灵活性。
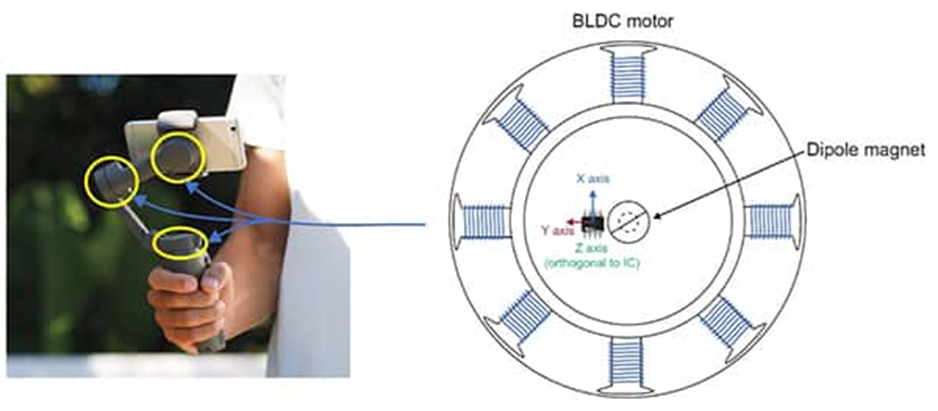
图 4:具有多个磁场灵敏度范围的 3D 霍尔效应传感器在手持式相机平台和无人机完向电机中具有重要的作用。(图片来源:Texas Instruments)平面外测量往往会造成不同的磁场强度(增益)和不相同轴的偏移,这会造成角度计算误差。使用具有增益和偏移校正功能的 3D 霍尔传感器时,可灵活地相对于磁铁于放置传感器,以确保角度计算最精确。
Texas instruments 为设计者提供了一系列三轴线性霍尔效应传感器,包括TMAG5170系列高精度 3D 线性霍尔效应传感器和TMAG5273 系列低功率线D 霍尔效应传感器,两者均具有循环冗余校验功能 (CRC),但 前者采用 10 MHz串行外设接口(SPI),后者采用 I²C 接口。TMAG5170器件针对快速、准确的位置检测进行了优化,具体包括:线°C 时最大)、灵敏度温度漂移为 ±2.8%(最大)和单轴转换率为 20 Ksps(每秒 2 万个样本)。TMAG7273器件地方特点是低功耗,具体为:2.3 mA 活动模式电流、1 μA 唤醒和睡眠模式电流和 5 nA 睡眠模式电流。这些 IC 包括四个主要功能块(图 5)。
霍尔传感器、相关偏置以及多路复用器、噪声滤波器、温度检测、积分电路和模数转换器 (ADC) 组成了检测、温度测量功能块。
通信控制电路、静电放电 (ESD) 保护、输入/输出 (I/O) 功能和 CRC 均包含在接口功能块中。
数字内核包括诊断电路和集成角度计算引擎,前者用于强制性和由用户启用的诊断检查功能以及其他内部管理功能,后者用于为在轴和偏轴角度测量提供 360° 角位置信息。
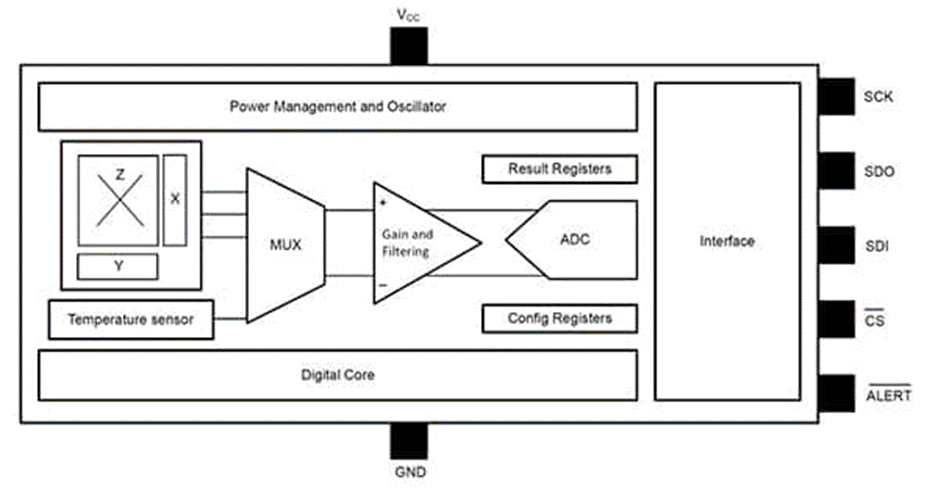
图 5:TMAG5170 型号器件和 TMAG5273 型号器件除了分别采用 SPI 接口(如上图所示)和 I²C 接口外,其所用 3D 霍尔效应传感器 IC 的内部功能模块是相同的。(图片来源:Texas Instruments)TMAG5170器件采用 8 针 VSSOP 封装,尺寸为 3.00 x 3.00 mm 且指定环境温度范围为 -40°C 至 +150°C。TMAG5170A1的灵敏度范围为 ±25 毫特斯拉 (mT)、±50 mT 和 ±100 mT,而TMAG5170A2则为 ±75 mT、±150 mT 和 ±300 mT 。TMAG5273低功耗系列采用 6 针 DBV 封装,尺寸为 2.90 x 1.60 mm 且指定环境温度范围为 -40℃ 至 +125℃。该系列分为两种不同的型号;TMAG5273A1的灵敏度范围为 ±40 mT 和 ±80 mT,而TMAG5273A2的灵敏度则为 ±133 mT 和 ±266 mT。两个可由用户选择的磁轴用于角度计算。通过磁增益和偏移校正,可最大限度地降低系统机械误差源的影响。板载温度补偿功能可用于独立补偿磁铁或传感器的温度变化。这些 3D 霍尔效应传感器能够最终靠通信接口进行配置,以实现由用户控制的磁轴和温度测量组合。TMAG5170的 ALERT 引脚或 TMAG5273 的 INT 引脚可以被 MCU 用来触发新的传感器转换。评估板高效提升启动工作Texas Instruments 还提供两块评估板用于基本功能评估,一块用于TMAG5170系列,另一块用于TMAG5273系列(图 6)。TMAG5170EVM 包括了安装在同一块快拆板上的 TMAG5170A1 和 TMAG5170A2 型号器件。TMAG5273EVM 的 TMAG5273A1 和 TMAG5273A2 型号器件安装在同一块快拆电路板上。这两种评估板均包括一块带有图形用户界面 (GUI) 传感器控制板,从而便于查看、保存测量结果并对寄存器进行读写操作。通过 3D打印制成的旋转和推动模块用来测试常见的角度测量功能。

图 6:TMAG5170EVM 和 TMAG5273EVM 都包括一块具有两个不同的 3D 霍尔效应传感器 IC 的快装电路板(右下),一个传感器控制板(左下),通过 3D 打印制造的旋转和推动模块(中间)以及一根 USB 电源电缆。(图片来自:Texas Instruments)
图 7:安装在 EVM 顶部的 3D 打印旋转和推动模块插图。(图片来自:Texas Instruments)
在使用 3D 霍尔效应位置传感器时,设计者需要注意一些具体实施方面的问题。
TMAG5170 的结果寄存器的 SPI 读数或者 TMAG5273 的I²C 读数需要与转换更新时间同步,以确保读取正确的数据。TMAG5170 的 ALERT 信号或TMAG5273 的 INT 信号可用于在转换完成且数据准备就绪时通知控制器。
低电感去耦电容器必须放置在传感器引脚附近。建议使用电容值至少为 0.01 μF 的陶瓷电容器。
这些霍尔效应传感器能嵌入采用非铁材料(如塑料或铝)制成的外壳内,而检测用磁铁位于外壳外面。传感器和磁铁也可放置与 PC 板相对的一侧。
随着 3D 运动和控制的发展,设计者既需要实时获取准确的测量结果,同时希望能够通过简化设计,在将成本降至最低的同时,尽可能地降低功耗。如上文所示,TMAG5170 和 TMAG5273 集成 3D 霍尔效应传感器解决了这样一些问题。它们不仅为实时精确控制提供了快速采样率和低延迟灵活性,还特别为电池供电型设备提供了慢速采样率,从而最大限度地降低功耗。此外,通过集成增益和失调校正算法,以及磁铁和传感器的独立温度校正功能来确保测量的高精确度,满足了设计者对性能和成本效益的双重要求。