
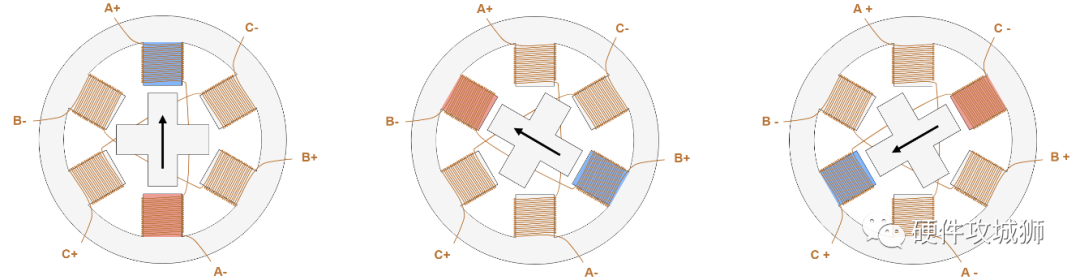
图1: 步进电机截面图步进电机的基本工作原理为:给一个或多个定子相位通电,线圈中通过的电流会产生磁场,而转子会与该磁场对齐;依次给不同的相位施加电压,转子将旋转特定的角度并最终到达需要的位置。图2显示了其工作原理。首先,线圈A通电并产生磁场,转子与该磁场对齐;线圈B通电后,转子顺时针旋转60°以与新的磁场对齐;线圈C通电后也会出现同样的情况。下图中定子小齿的颜色指示出定子绕组产生的磁场方向。
实际上,并非所有步进电机都具有相同的内部结构(或构造),因为不同电机的转子和定子配置都不同。
可变磁阻转子:转子由铁芯制成,其形状特殊,可以与磁场对齐(请参见图1和图2)。这种转子更容易实现高速度和高分辨率,但它产生的扭矩通常较低,并且没有制动扭矩。
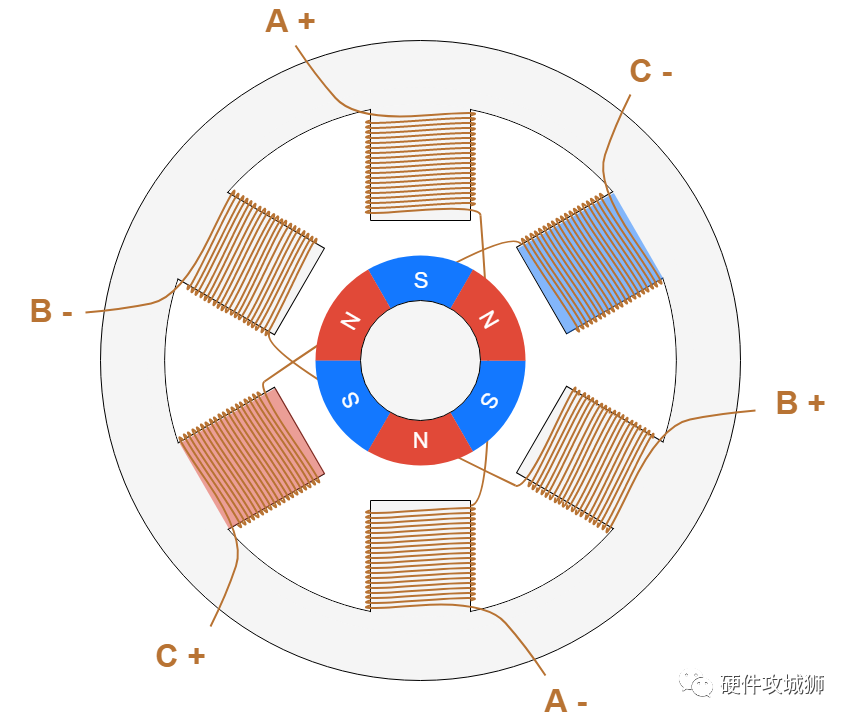
混合式转子:这种转子具有特殊的结构,它是永磁体和可变磁阻转子的混合体。其转子上有两个轴向磁化的磁帽,并且磁帽上有交替的小齿。这种配置使电机同时具有永磁体和可变磁阻转子的优势,尤其是具有高分辨率、高速度和大扭矩。当然更高的性能要求意味着更复杂的结构和更高的成本。
图3显示了这种电机结构的简化示意图。线圈A通电后,转子N磁帽的一个小齿与磁化为S的定子齿对齐。与此同时,由于转子的结构,转子S磁帽与磁化为N的定子齿对齐。尽管步进电机的工作原理是相同的,但实际电机的结构更复杂,齿数要比图中所示的更多。大量的齿数可以使电机获得极小的步进角度,小至0.9°。
晶体管桥:从物理上控制电机线圈电气连接的设备。晶体管可以看作是电控断路器,它闭合时线圈连接到电源,线圈中才有电流通过。每个电机相位都需要一个晶体管电桥。
Step/Direction (步进/方向)–在Step引脚上发送一个脉冲,驱动器即改变其输出使电机执行一次步进,转动方向则由Direction引脚上的电平来决定。
Phase/Enable(相位/使能)–对每相的定子绕组来说,Enable决定该相是否通电, Phase决定该相电流方向,。
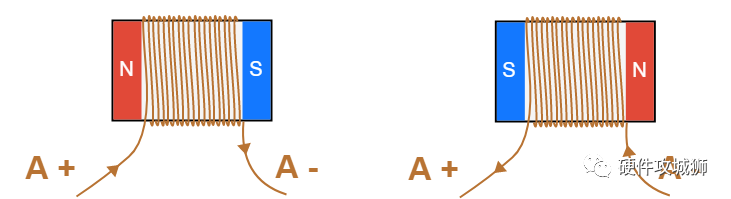
如果MOSFET 1导通,则电流从AM流向A +。如果MOSFET 2导通,则电流从AM流向A-,在相反方向上产生磁场。如上所述,这种办法能够简化驱动电路(仅需要两个半导体),但缺点是一次仅使用了电机中铜导体的一半,这在某种程度上预示着如果线圈中流过相同的电流 ,则磁场强度仅为使用全部铜导体时的一半。另外,由于电机输入引线更多,这类电机较难构造。
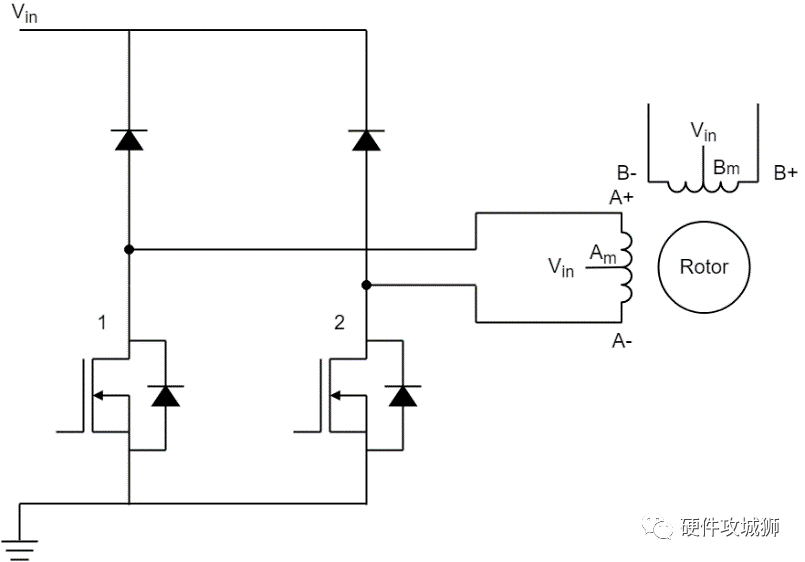
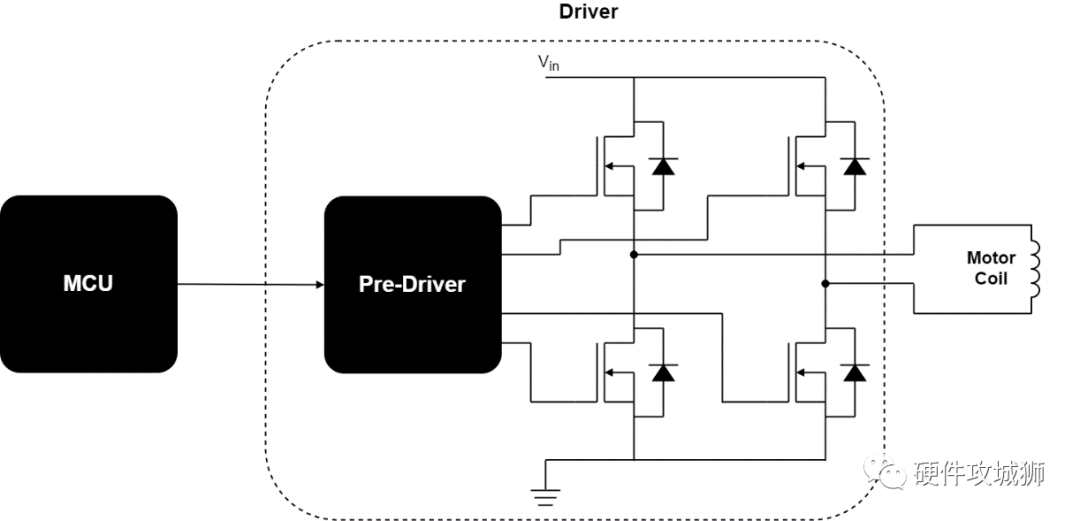
图9: 单极步进电机驱动电路在双极步进电机中,每个线圈只有两条引线,而且为了控制方向,一定要使用H桥(请参见图10)。如图8所示,如果MOSFET 1和4导通,则电流从A +流向A-;如果MOSFET 2和3导通,则电流从A-流向A +,产生相反方向的磁场。这种方案需要更复杂的驱动电路,但可以最大限度利用电机铜量而实现最大扭矩。

图10: 双极步进电机驱动电路随技术的慢慢的提升,单极电机的优势逐步弱化,双极步进电机成为目前最流行的电机类型。步进电机驱动技术步进电机主要有四种不同的驱动技术:
波动模式:一次仅一个相位通电(见图11)。为简单起见,如果电流从某相的正引线流向负引线(例如,从A +到A-),则我们称为正向流动;否则,称为负向流动。从下图左侧开始,电流仅在A相中正向流动,而用磁体代表的转子与其所产生的磁场对齐。接着,电流仅在B相中正向流动,转子顺时针旋转90°以与B相产生的磁场对齐。随后,A相再次通电,但电流负向流动 ,转子再次旋转90°。最后,电流在B相中负向流动,而转子再次旋转90°。
微步模式:可以看作是半步模式的增强版,因为它能更加进一步减小步距,并且具有恒定的扭矩输出。这是经过控制每相流过的电流强度来实现的。与其他方案相比,微步模式需要更复杂的电机驱动器。图14显示了微步模式的工作原理。假设IMAX是一个相位中可以通过的最大电流,则从图中左侧开始,在第一个图中IA = IMAX,IB = 0。下一步,控制电流以达到IA = 0.92 x IMAX,IB = 0.38 x IMAX,它产生的磁场与前一个磁场相比顺时针旋转了22.5°。控制电流达到不一样的电流值并重复此步骤,将磁场旋转45°、67.5°和90°。与半步模式相比,它将步距减少了一半;但还能够大大减少更多。使用微步模式能够达到非常高的位置分辨率,但其代价是需要更复杂的设备来控制电机,并且每次步进产生的扭矩也更小。扭矩与定子磁场和转子磁场之间的夹角正弦成正比;因此,当步距较小时,扭矩也较小。这有一定的概率会导致丢步,也就是说,即使定子绕组中的电流发生了变化,转子的位置也可能不改变。

图14: 微步模式步进步进电机的优缺点现在我们已了解了步进电机的工作原理,再总结一下各类电机的优缺点将非常有帮助。优点:
得益于其内部结构,步进电机不需要传感器来检测电机位置。步进电机是通过执行“步进”来运动的,因此只需简单地计算步数就能够得到给定时间的电机位置。
此外,步进电机的控制格外的简单。它也需要驱动器,但不需要复杂的计算或调整即可正常工作。与其他电机相比,其控制工作量通常很小。而且,如果采用微步模式,还能轻松实现高达0.007°的位置精度。
步进电机在低速时可提供良好的扭矩,也能很好的保持位置,而且常规使用的寿命长。
当负载扭矩过高时可能会失步。由于无法获知电机的实际位置,因此会对控制产生负面影响。采用微步模式时更易产生此问题。
步进电机即使在静止时也总是消耗最大电流,因此会降低效率并可能会引起过热。
总而言之,当您需要成本低廉、易于控制的解决方案,且对高速时的效率和扭矩要求不高时,步进电机是最好的选择。要了解如何为您的项目选择正确的电机类型,并进一步了解步进电机、有刷电机和无刷电机之间的区别,请单击此处。
*博客内容为网友个人发布,仅代表博主个人自己的观点,如有侵权请联系工作人员删除。